Es folgt ein Auszug aus meinem neuen Buch „Unglaubliche Geschichten aus dem Weltraum: Ein Blick hinter die Kulissen der Missionen, die unsere Sicht auf den Kosmos verändern“, das morgen, Dezember, veröffentlicht wird. Das Buch ist ein Einblick in mehrere aktuelle Themen NASA-Robotermissionen, und dieser Auszug ist Teil 1 von 3, der hier im Space Magazine in Kapitel 2, „Roving Mars with Curiosity“, veröffentlicht wird. Das Buch kann bei Amazon und Barnes & Noble bestellt werden.
Sieben Minuten Terror
Es dauert ungefähr sieben Minuten, bis ein mittelgroßes Raumschiff - wie ein Rover oder ein Roboterlander - durch die Marsatmosphäre abtaucht und die Oberfläche des Planeten erreicht. Während dieser kurzen Minuten muss das Raumschiff von seiner lodernden Eingangsgeschwindigkeit von etwa 20.900 km / h abbremsen, um mit nur 3 km / h oder weniger aufzusetzen.
Dies erfordert eine Rube Goldberg-ähnliche Veranstaltungsreihe, die in perfekter Reihenfolge mit präziser Choreografie und Timing stattfindet. Und alles muss automatisch über den Computer geschehen, ohne dass irgendjemand auf der Erde etwas eingibt. Es gibt keine Möglichkeit, das Raumschiff von unserem Planeten aus zu entfernen, der etwa 250 Millionen Kilometer entfernt ist. In dieser Entfernung beträgt die Verzögerungszeit des Funksignals von der Erde zum Mars mehr als 13 Minuten. Daher sind bis zum Ende des siebenminütigen Abstiegs all diese Ereignisse eingetreten - oder nicht eingetreten - und niemand auf der Erde weiß, welche. Entweder sitzt Ihr Raumschiff großartig auf der Oberfläche des Mars oder es liegt auf einem abgestürzten Haufen.

Deshalb nennen es Wissenschaftler und Ingenieure von den Missionen zum Mars "Sieben Minuten Terror".
Und mit der Mission des Mars Science Laboratory (MSL), die im November 2011 von der Erde aus gestartet wurde, nahm die Angst und Besorgnis über das, was offiziell als „Einreise, Abstieg und Landung“ (EDL) bezeichnet wird, exponentiell zu. MSL verfügt über einen 1-Tonnen-Rover (900 kg) mit 6 Rädern namens Curiosity. Dieser Rover sollte ein brandneues, noch nicht erprobtes Landesystem verwenden.
Bisher haben alle Marslander und -rover - in der Reihenfolge - einen raketengeführten Einstieg, einen Hitzeschild zum Schutz und zur Verlangsamung des Fahrzeugs, dann einen Fallschirm und Triebwerke verwendet, um das Fahrzeug noch weiter zu verlangsamen. Neugier würde diese Sequenz auch verwenden. Eine letzte, entscheidende Komponente umfasste jedoch eines der komplexesten Landegeräte, die jemals geflogen wurden.

Eine schwebende Raketenstufe, die als „Sky Crane“ bezeichnet wurde, senkte den Rover auf 20 m langen Kabeln aus Vectran-Seilen wie ein abseilender Bergsteiger, wobei der Rover sanft auf seinen Rädern landete. Dies alles musste in Sekundenschnelle erledigt sein, und wenn der Bordcomputer eine Landung spürte, trennte die Pyrotechnik die Seile, und die schwebende Abstiegsstufe zoomte mit Vollgas weg, um weit weg von Curiosity zu landen.
Um die Sache noch komplizierter zu machen, würde dieser Rover die präziseste Landung außerhalb der Welt aller Zeiten versuchen und sich in einem Krater neben einem Berg auf der Höhe des Mount Rainier niederlassen.
Ein wesentlicher Teil der Unsicherheit bestand darin, dass Ingenieure niemals das gesamte Landesystem nacheinander testen konnten. Und nichts könnte die brutalen atmosphärischen Bedingungen und die leichtere Schwerkraft auf dem Mars simulieren, außer auf dem Mars selbst zu sein. Da die eigentliche Landung das erste Mal war, dass der vollwertige Sky Crane verwendet wurde, gab es Fragen: Was wäre, wenn sich die Kabel nicht trennen würden? Was ist, wenn die Abstiegsstufe direkt über dem Rover abfällt?
Wenn der Sky Crane nicht funktionieren würde, wäre es ein Spiel für eine Mission, die bereits so viel überwunden hatte: technische Probleme, Verzögerungen, Kostenüberschreitungen und der Zorn der Kritiker, die sagten, dieser 2,5-Milliarden-Dollar-Marsrover blutete Geld weg der Rest des Planetenerkundungsprogramms der NASA.

Missionen zum Mars
Mit seinem roten Schein am Nachthimmel lockt der Mars seit Jahrhunderten Himmelsbeobachter an. Als der der Erde am nächsten gelegener Planet, der Potenzial für zukünftige menschliche Missionen oder Kolonisierung bietet, war er im Zeitalter der Weltraumforschung von großem Interesse. Bis heute wurden über 40 Robotermissionen auf dem Roten Planeten gestartet… genauer gesagt, über 40 Missionen versucht.
Einschließlich aller Bemühungen der USA, Europas, Sowjets / Russlands und Japans ist mehr als die Hälfte der Mars-Missionen gescheitert, entweder aufgrund einer Startkatastrophe, einer Fehlfunktion auf dem Weg zum Mars, eines verpatzten Versuchs, in die Umlaufbahn zu rutschen, oder einer katastrophalen Landung. Während die jüngsten Missionen erfolgreicher waren als unsere ersten bahnbrechenden Versuche, den Mars vor Ort (vor Ort) zu erkunden, machen Weltraumwissenschaftler und -ingenieure nur teilweise Witze, wenn sie über Dinge wie einen „großen galaktischen Ghul“ oder den „Marsfluch“ sprechen, der das durcheinander bringt Missionen.

Aber es gab auch wunderbare Erfolge. Frühe Missionen in den 1960er und 70er Jahren wie Mariner-Orbiter und Wikingerlander zeigten uns eine auffallend schöne, wenn auch karge und felsige Welt, wodurch alle Hoffnungen auf „kleine grüne Männer“ als unsere planetarischen Nachbarn zunichte gemacht wurden. Spätere Missionen zeigten jedoch eine Zweiteilung: großartige Verwüstung kombiniert mit verlockenden Hinweisen auf vergangene - oder vielleicht sogar heutige - Wasser und globale Aktivitäten.
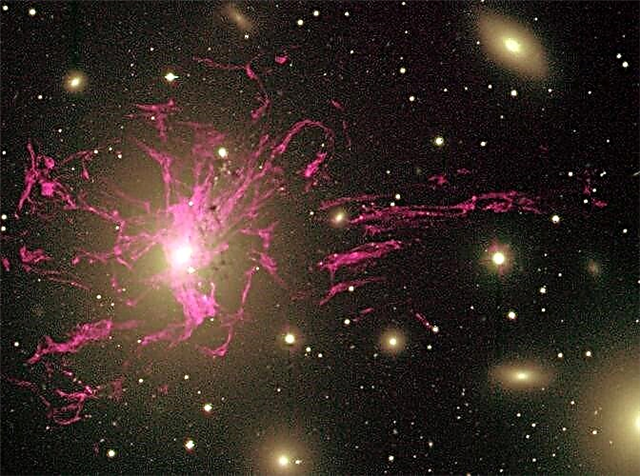
Heute ist die Marsoberfläche kalt und trocken und ihre hauchdünne Atmosphäre schützt den Planeten nicht vor dem Beschuss mit Sonnenstrahlung. Es gibt jedoch Hinweise darauf, dass die Bedingungen auf dem Mars nicht immer so waren. Von der Umlaufbahn aus sind Kanäle und komplizierte Talsysteme sichtbar, die scheinbar von fließendem Wasser geschnitzt wurden.
Seit Jahrzehnten diskutieren Planetenforscher, ob sich diese Merkmale in kurzen, feuchten Perioden gebildet haben, die durch katastrophale Ereignisse wie einen massiven Asteroidenschlag oder plötzliche Klimakatastrophen verursacht wurden, oder ob sie sich über Millionen von Jahren gebildet haben, als der Mars möglicherweise kontinuierlich warm und nass war. Ein Großteil der bisherigen Beweise ist nicht eindeutig; Diese Merkmale könnten sich so oder so gebildet haben. Aber vor Milliarden von Jahren, wenn es Flüsse und Ozeane gäbe, genau wie auf der Erde, hätte das Leben vielleicht Einzug gehalten.

Die Rover
Der Curiosity Rover ist das vierte mobile Raumschiff, das die NASA an die Marsoberfläche geschickt hat. Der erste war ein 10,6 kg schwerer Rover namens Sojourner, der am 4. Juli 1997 auf einer felsbedeckten Mars-Ebene landete. Der 65 cm lange Sojourner hatte die Größe eines Mikrowellenofens und wurde nie überquert mehr als 40 Fuß von seinem Lander und seiner Basisstation entfernt. Der Rover und der Lander bildeten zusammen die Pathfinder-Mission, die voraussichtlich etwa eine Woche dauern würde. Stattdessen dauerte es fast drei Monate, und das Duo gab 2,6 Gigabit Daten zurück, machte mehr als 16.500 Bilder vom Lander und 550 Bilder vom Rover, nahm chemische Messungen von Felsen und Boden vor und untersuchte die Marsatmosphäre und das Wetter. Es identifizierte Spuren einer wärmeren, feuchteren Vergangenheit für den Mars.

Die Mission fand statt, als das Internet gerade an Popularität gewann und die NASA beschloss, Bilder vom Rover online zu stellen, sobald sie auf die Erde gestrahlt wurden. Dies war eines der größten Ereignisse in der Geschichte des jungen Internets. Die NASA-Website (und die für die hohe Nachfrage eingerichteten Spiegel-Websites) erhielten in den ersten 20 Tagen nach der Landung über 430 Millionen Zugriffe.
Auch Pathfinder verwendete ein ungewöhnliches Landesystem. Anstatt Triebwerke zum Aufsetzen auf der Oberfläche zu verwenden, entwickelten die Ingenieure ein System aus riesigen Airbags, um das Raumschiff zu umgeben und zu schützen. Nach Verwendung des herkömmlichen Systems eines raketengeführten Eingangs, eines Hitzeschilds, von Fallschirmen und Triebwerken wurden die Airbags aufgeblasen und der Kokonlander aus 30 m Höhe über dem Boden fallen gelassen. Pathfinder sprang mehrmals wie ein riesiger Wasserball über die Oberfläche des Mars und blieb schließlich stehen, die Airbags entleerten sich und der Lander öffnete sich, damit der Rover auftauchen konnte.
Das mag nach einer verrückten Landestrategie klingen, aber es hat so gut funktioniert, dass die NASA beschlossen hat, größere Versionen der Airbags für die nächste Rover-Mission zu verwenden: zwei identische Rover namens Spirit und Opportunity. Die Mars Exploration Rovers (MER) haben etwa die Größe eines reitenden Rasenmähers, sind 1,6 Meter lang und wiegen 185 Kilogramm. Spirit landete am 4. Januar 2004 erfolgreich in der Nähe des Marsäquators und drei Wochen später erholte sich die Gelegenheit auf der anderen Seite des Planeten. Das Ziel von MER war es, Hinweise auf vergangenes Wasser auf dem Mars zu finden, und beide Rover knackten den Jackpot. Unter vielen Befunden fand Opportunity alte Felsvorsprünge, die sich in fließendem Wasser gebildet hatten, und Spirit fand ungewöhnliche blumenkohlförmige Silikagesteine, die Wissenschaftler noch untersuchen, aber sie könnten Hinweise auf potenzielles altes Marsleben liefern.

Unglaublicherweise ist der Opportunity Rover bei diesem Schreiben (2016) immer noch in Betrieb und fährt mehr als einen Marathon (42 km). Er erforscht den Mars weiterhin in einem großen Krater namens Endeavour. Spirit erlag jedoch im kalten Marswinter 2010 einem Stromausfall, nachdem er in einer Sandfalle stecken geblieben war. Die beiden Rover überlebten ihre geplante Lebensdauer von 90 Tagen bei weitem.
Irgendwie entwickelten die Rover jeweils eine eigene „Persönlichkeit“ - oder besser gesagt, Menschen zugewiesen Persönlichkeiten zu den Robotern. Spirit war ein Sorgenkind und eine Drama-Königin, musste aber um jede Entdeckung kämpfen. Gelegenheit, eine privilegierte jüngere Schwester und Star-Performerin, da ihr neue Erkenntnisse leicht zu fallen schienen. Geist und Gelegenheit waren nicht dazu gedacht, bezaubernd zu sein, aber die charmanten Rover erregten die Fantasie von Kindern und erfahrenen Weltraumveteranen gleichermaßen. MER-Projektmanager John Callas nannte die Twin Rover einmal "die süßesten verdammten Dinge im Sonnensystem". Als die langlebigen, mutigen Rover Gefahren und Gefahren überwanden, schickten sie jeden Tag Postkarten vom Mars. Und Erdlinge liebten sie dafür.
Neugierde
Während es schon lange auf unserer Space-To-Do-Liste steht, haben wir noch nicht ganz herausgefunden, wie wir Menschen zum Mars schicken können. Wir brauchen größere und fortschrittlichere Raketen und Raumfahrzeuge, bessere Technologien für Dinge wie Lebenserhaltung und den Anbau unserer eigenen Nahrung, und wir haben wirklich nicht die Fähigkeit, die sehr großen Nutzlasten zu landen, die für die Schaffung einer menschlichen Siedlung auf dem Mars erforderlich sind.
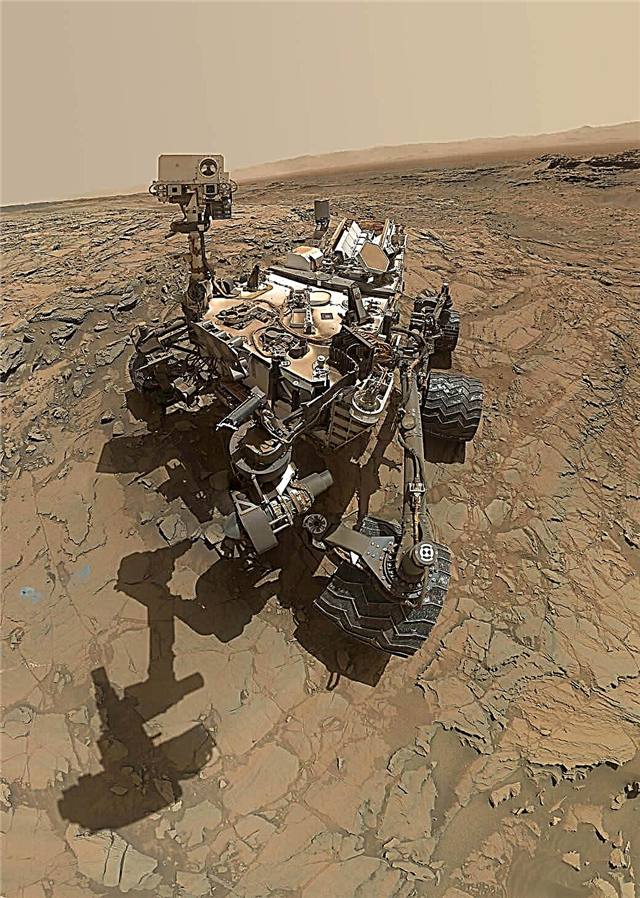
Aber in der Zwischenzeit haben wir - während wir versuchen, all das herauszufinden - das Roboteräquivalent eines menschlichen Geologen auf den Roten Planeten geschickt. Der kurvengroße Curiosity Rover ist mit einer Reihe von siebzehn Kameras, einem Bohrer, einer Schaufel, einer Handlinse und sogar einem Laser ausgestattet. Diese Werkzeuge ähneln Geräten, mit denen Geologen Gesteine und Mineralien auf der Erde untersuchen. Zusätzlich ahmt dieser Rover die menschliche Aktivität nach, indem er bergauf klettert, (bildlich gesprochen) isst, seinen (Roboter-) Arm beugt und Selfies macht.

Dieser umherziehende Roboter-Geologe ist auch ein mobiles Chemielabor. Insgesamt zehn Instrumente auf dem Rover helfen bei der Suche nach organischem Kohlenstoff, der auf den vom Leben benötigten Rohstoff hinweist, und „schnüffeln“ an der Marsluft, um zu riechen, ob Gase wie Methan - was ein Lebenszeichen sein könnte - vorhanden sind. Der Roboterarm von Curiosity trägt ein Gerätemesser der Schweizer Armee: eine Kamera mit Vergrößerungslinse, ein Spektrometer zum Messen chemischer Elemente und einen Bohrer zum Bohren in Gesteinen und zum Zuführen von Proben an die Labors SAM (Sample Analysis at Mars) und CheMin (Chemie und Mineralogie). Der ChemCam-Laser kann Gestein aus einer Entfernung von bis zu 7 Metern verdampfen und die Mineralien aus dem vom gestrahlten Gestein emittierten Lichtspektrum identifizieren. Eine Wetterstation und ein Strahlungsmonitor runden die Geräte an Bord ab.
Mit diesen Kameras und Instrumenten wird der Rover zum Auge und zur Hand eines internationalen Teams von etwa 500 erdgebundenen Wissenschaftlern.
Während die vorherigen Marsrover Solaranlagen verwendeten, um Sonnenlicht für Strom zu sammeln, verwendet Curiosity eine RTG wie New Horizons. Der vom RTG erzeugte Strom treibt wiederholt wiederaufladbare Lithium-Ionen-Batterien an, und die Wärme des RTG wird auch in das Rover-Chassis geleitet, um die Innenelektronik warm zu halten.
Aufgrund der Größe und des Gewichts von Curiosity kam das von den vorherigen Rovers verwendete Airbag-Landesystem nicht in Frage. Wie der NASA-Ingenieur Rob Manning erklärte: "Sie können etwas so Großes nicht abprallen lassen." Der Sky Crane ist eine kühne Lösung.
Die Mission von Curiosity: Finden Sie heraus, wie sich der Mars über Milliarden von Jahren entwickelt hat, und stellen Sie fest, ob er einst das mikrobielle Leben unterstützen konnte oder kann.
Das Ziel der Neugierde für Erkundungen: ein 5,5 km hoher Mars-Bergwissenschaftler nennt den Berg. Sharp (früher bekannt als Aeolis Mons) befindet sich mitten im Gale Crater, einem Einschlagbecken mit einem Durchmesser von 155 km.
Gale wurde aus 60 Kandidatenstandorten ausgewählt. Daten von umlaufenden Raumfahrzeugen ergaben, dass der Berg Dutzende von Sedimentgesteinsschichten aufweist, die möglicherweise über Millionen von Jahren gebaut wurden. Diese Schichten könnten die Geschichte der geologischen und klimatischen Geschichte des Mars erzählen. Außerdem scheinen sowohl der Berg als auch der Krater Kanäle und andere Merkmale zu haben, die aussehen, als wären sie von fließendem Wasser geschnitzt worden.
Der Plan: MSL würde in einem tieferen, flacheren Teil des Kraters landen und sich vorsichtig nach oben in Richtung Berg arbeiten, jede Schicht studieren und im Wesentlichen eine Tour durch die Epochen der geologischen Geschichte des Mars machen.
Das Schwierigste wäre, dorthin zu gelangen. Und das MSL-Team hatte nur eine Chance, es richtig zu machen.
Landing Night
Die Landung von Curiosity am 5. August 2012 war eines der am meisten erwarteten Weltraumerkundungsereignisse in der jüngeren Geschichte. Millionen von Menschen sahen zu, wie sich Ereignisse online und im Fernsehen abspielten, und Social-Media-Feeds waren voller Updates. Der Feed von NASA TV von JPLs Missionskontrolle wurde live auf den Bildschirmen auf dem New Yorker Time Square und an Orten auf der ganzen Welt übertragen, an denen Landungspartys stattfanden.
Das Epizentrum der Aktion befand sich jedoch bei JPL, wo sich Hunderte von Ingenieuren, Wissenschaftlern und NASA-Beamten in der JPL Space Flight Operations Facility versammelten. Das EDL-Team - alle mit passenden hellblauen Poloshirts - überwachte Computerkonsolen bei der Missionskontrolle.
Zwei Mitglieder des Teams stachen heraus: Der EDL-Teamleiter Adam Steltzner, der seine Haare in einem Elvis-ähnlichen Pompadour trägt, ging zwischen den Konsolenreihen auf und ab. Flugdirektor Bobak Ferdowski sportlich und ein ausgefeilter Stars and Stripes Mohawk. Offensichtlich haben im 21. Jahrhundert exotische Frisuren die schwarzen Brillen und Taschenschützer der 1960er Jahre für NASA-Ingenieure ersetzt.

Zum Zeitpunkt der Landung war Ashwin Vasavada einer der dienstältesten Wissenschaftler im Missionsteam, nachdem er 2004 als stellvertretender Projektwissenschaftler zu MSL gekommen war, als der Rover im Bau war. Damals bestand ein großer Teil von Vasavadas Arbeit darin, mit den Instrumententeams zusammenzuarbeiten, um die Ziele ihrer Instrumente festzulegen und technische Teams zu beaufsichtigen, um die Instrumente zu entwickeln und sie in den Rover zu integrieren.
Jedes der zehn ausgewählten Instrumente brachte ein Team von Wissenschaftlern mit, sodass mit Ingenieuren, zusätzlichem Personal und Studenten Hunderte von Menschen den Rover für den Start vorbereiteten. Vasavada half dabei, jede Entscheidung und Änderung zu koordinieren, die sich auf die eventuelle Wissenschaft auf dem Mars auswirken könnte. Während der Landung konnte er jedoch nur zuschauen.
"Ich war in dem Raum neben dem Kontrollraum, der im Fernsehen gezeigt wurde", sagte Vasavada. "Für die Landung gab es nichts, was ich tun konnte, außer die letzten acht Jahre meines Lebens zu realisieren, und meine gesamte Zukunft war von diesen sieben Minuten EDL geprägt."
Die Tatsache, dass niemand das wahre Schicksal des Rovers bis 13 Minuten nach der Tatsache aufgrund der Funkverzögerungszeit kennen würde, führte zu einem Gefühl der Hilflosigkeit für alle bei JPL.
"Obwohl ich auf einem Stuhl saß", fügte Vasavada hinzu, "war ich geistig in der fötalen Position zusammengerollt."
Als Curiosity näher an den Mars heranrückte, bewegten sich drei andere erfahrene Raumschiffe, die den Planeten bereits umkreisten, in Position, um den Neuankömmling MSL im Auge zu behalten, der Informationen über seinen Status übermittelte. Zunächst kommunizierte MSL direkt mit den DSN-Antennen (Deep Space Network) auf der Erde.
Um die Telemetrie des Raumfahrzeugs während der EDL so rational wie möglich zu gestalten, sendete Curiosity 128 einfache, aber unterschiedliche Töne aus, die anzeigen, wann Schritte im Landevorgang aktiviert wurden. Allen Chen, ein Ingenieur im Kontrollraum, kündigte jeden an, als sie kamen: Ein Geräusch zeigte an, dass das Raumschiff in die Marsatmosphäre eingedrungen war; Ein anderer signalisierte, dass die Triebwerke abgefeuert wurden, und führte das Raumschiff in Richtung Gale Crater. Vorläufiges Klatschen und Lächeln kamen vom Team von Mission Control in den frühen Tönen, wobei die Emotionen zunahmen, als sich das Raumschiff immer näher an die Oberfläche rückte.
Auf halbem Weg durch den Abstieg ging MSL unter den Marshorizont und stellte die Kommunikation mit der Erde außer Kraft. Die drei Orbiter - Mars Odyssey, Mars Reconnaissance Orbiter und Mars Express - waren jedoch bereit, Daten zu erfassen, aufzuzeichnen und an den DSN weiterzuleiten.

Nahtlos kamen die Töne immer wieder auf die Erde, während jeder Schritt der Landung fehlerfrei fortgesetzt wurde. Der Fallschirm wurde ausgelöst. Der Hitzeschild fiel weg. Ein Ton signalisierte die Abstiegsstufe, in der der Rover den Fallschirm losließ, ein weiterer deutete auf einen motorisierten Flug und einen Abstieg zur Oberfläche hin. Ein anderer Ton bedeutete, dass der Himmelskran den Rover an die Oberfläche senkte.
Ein Ton kam an und zeigte an, dass die Räder von Curiosity die Oberfläche berührten, aber selbst das bedeutete keinen Erfolg. Das Team musste sicherstellen, dass das Sky Crane-Flugmanöver funktionierte.
Dann kam der Ton, auf den sie warteten: "Touchdown bestätigt", jubelte Chen. "Wir sind auf dem Mars sicher!"
Pandemonium und Freude brachen in der Missionskontrolle von JPL, auf den Landing Party-Standorten und in den sozialen Medien aus. Es schien, als würde die Welt in diesem Moment zusammen gefeiert. Kostenüberschreitungen, Verzögerungen und all die negativen Dinge, die jemals über die MSL-Mission gesagt wurden, schienen mit dem Triumph der Landung zu verschwinden.
"Willkommen auf dem Mars!" Der Direktor des Jet Propulsion Laboratory, Charles Elachi, sagte auf einer Pressekonferenz nach dem dramatischen Aufsetzen: „Heute Abend sind wir gelandet, morgen beginnen wir, den Mars zu erkunden. Unsere Neugier kennt keine Grenzen. “

"Die sieben Minuten gingen tatsächlich sehr schnell", sagte Vasavada. „Es war vorbei, bevor wir es wussten. Dann sprangen alle auf und ab, obwohl die meisten von uns noch verarbeiteten, dass es so erfolgreich lief. “
Dass die Landung so gut verlaufen ist - in der Tat perfekt -, hat möglicherweise einen Teil des JPL-Teams schockiert. Obwohl sie die Landung von Curiosity mehrmals einstudiert hatten, konnten sie das Fahrzeug in ihren Simulationen bemerkenswerterweise nie landen.
„Wir haben versucht, es sehr genau zu proben“, sagte Vasavada, „damit alles synchron war - sowohl die von uns simulierte Telemetrie, die vom Raumschiff kommen würde, als auch die erstellten Echtzeitanimationen. Es war eine ziemlich komplexe Sache, aber es hat nie wirklich funktioniert. Die tatsächliche Landung war also das erste Mal, dass alles richtig funktionierte. “
Curiosity wurde so programmiert, dass die Umgebung sofort fotografiert wird. Innerhalb von zwei Minuten nach der Landung wurden die ersten Bilder auf die Erde gestrahlt und bei JPL auf den Bildschirmen angezeigt.
"Wir hatten die Orbiter so eingestellt, dass sie während der Landung überfliegen, wussten aber nicht genau, ob ihre Relaisverbindung lange genug halten würde, um die ersten Bilder zu erhalten", sagte Vasavada. „Diese ersten Bilder waren ziemlich schäbig, weil die Schutzabdeckungen noch auf den Kameras waren und die Triebwerke viel Staub auf die Abdeckungen geworfen hatten. Wir konnten es nicht wirklich gut sehen, aber wir sind trotzdem auf und ab gesprungen, weil es Bilder vom Mars waren. "
Erstaunlicherweise zeigte eines der ersten Bilder genau, was der Rover zum Lernen geschickt hatte.
„Wir waren mit den Kameras gelandet, die im Grunde direkt auf den Berg gerichtet waren. Scharf «, sagte Vasavada kopfschüttelnd. „Im HazCam-Bild (Hazard Camera) direkt zwischen den Rädern hatten wir diese wunderschöne Aufnahme. Da war der Berg. Es war wie eine Vorschau auf die gesamte Mission direkt vor uns. “

Morgen: Teil 2 von "Roving Mars With Curiosity" mit "Living on Mars Time" und "Discoveries"
"Unglaubliche Geschichten aus dem Weltraum: Ein Blick hinter die Kulissen der Missionen, die unsere Sicht auf den Kosmos verändern" wird von Page Street Publishing, einer Tochtergesellschaft von Macmillan, veröffentlicht.