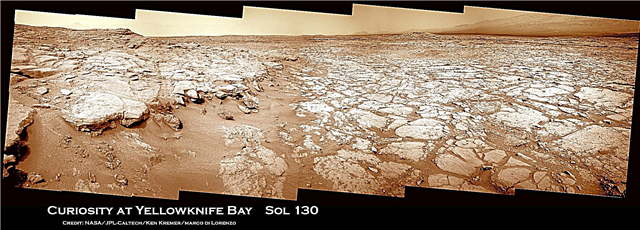
Bildunterschrift: Curiosity Scannt "Yellowknife Bay" auf Sol 130. 17, das aus Navigationskamerabildern (Navcam) zusammengefügt wurde. Bildnachweis: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Heute (25. Dezember) feiert Curiosity ihr erstes Weihnachtsfest auf dem Mars an einem Ort namens "Yellowknife Bay". Es ist Sol 138 und fast 5 Monate seit der Landung des Pulses am 6. August 2012 im Gale Crater. Der Roboter ist bei ausgezeichneter Gesundheit.
In der Zwischenzeit wird ihre ältere Schwester Opportunity in wenigen Wochen am 24. Januar 2013 - auf der anderen Seite des Planeten - in wenigen Wochen unergründliche 9 Erdjahre auf dem Mars feiern.
Der Curiosity Rover der NASA erreichte die flache Senke mit dem Namen "Yellowknife Bay" auf Sol 130 (17. Dezember 2012), nachdem er etwa 0,5 m einen sanften Hang hinunter in ein geologisches Merkmal namens "Glenelg" gesunken war. Sehen Sie sich unsere Panorama-Mosaike von Yellowknife Bay an - oben und unten für eine Kontextansicht.
Das Wissenschaftsteam sucht nach einem interessanten Stein für den ersten Einsatz des Hochleistungs-Bohrers.
Laut einem neuen Bericht in SpaceRef wurde das Bohren verzögert, da befürchtet wurde, dass durch Reibungserwärmung das Gestein möglicherweise zu einem klebrigen „Mars-Honig“ verflüssigt wird, der die Siebe und Mechanismen für die Probenhandhabung möglicherweise verstopfen und ernsthaft beschädigen könnte. Daher bewertet das Team die Art des Gesteinsziels und die Bohrvorgänge sorgfältig neu, bevor es sich auf die anfängliche Verwendung des Schlagbohrers am Turm am Ende des Roboterarms einlässt.
Das Team entschied sich für die Fahrt nach „Yellowknife Bay“, da es ein anderes geologisches Gelände bietet als Curiosity zuvor. Das Gebiet „Glenelg“ liegt an der Kreuzung von drei verschiedenen Arten von geologischem Gelände und ist das erste erweiterte wissenschaftliche Ziel von Curiosity.
Die Neugierde erreichte die Lippe der Yellowknife Bay auf der Sol 124 und betrat das Becken auf der Sol 125 (12. Dezember). Sie machte einen Panoramablick auf das einladende Gebietsschema. Der Rover verwendet außerdem das APXS-Röntgenmineralspektrometer, den ChemCam-Laser und den MAHLI-Handlinsen-Imager, um erste wissenschaftliche Charakterisierungsdaten zu erfassen.

Die Neugier steigt um die Yellowknife Bay am Sol 125, 12. Dezember 2012. Der Rover fuhr weiter im Becken auf der Suche nach dem ersten Gesteinsbohrziel. Bildnachweis: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Bisher hat der Rover eine Gesamtfahrstrecke von rund 700 Metern zurückgelegt.
Der größte Teil des Wissenschafts- und Ingenieurteams hat eine dringend benötigte Pause, um Zeit mit seinen Familien zu verbringen, nachdem er vorab Aktivitäten im Wert von 11 Sols hochgeladen hat, damit der Roboter während der Weihnachtsferien am Brummen bleibt. Eine Skeleton-Crew bei JPL überwacht alle Eventualitäten.
Eine der obersten Prioritäten ist die Aufnahme eines hochauflösenden 360-Grad-Mastcam-Farbpanoramas. Dies ist von unschätzbarem Wert für die Auswahl des ersten Gesteinsziels, in das gebohrt und eine Probe aus dem Inneren entnommen werden soll - eine Leistung, die auf dem Mars noch nie zuvor versucht wurde.
„Wir haben uns entschlossen, an einen Ort mit guter Sicht auf die Aufschlüsse rund um Yellowknife Bay zu fahren, um diese Aufschlüsse vor der Ferienpause gut abbilden zu können“, sagt Ken Herkenhoff, Mitglied des Rover Science-Teams. „Da die Bilder während der Pause zurückgegeben werden, können wir sie verwenden, um zu entscheiden, wo der erste Bohrvorgang durchgeführt werden soll.“
Das Team geht davon aus, dass nach einem sorgfältigen Auswahlprozess im Januar 2013 ein Bohrziel ausgewählt wird.
Der 2 m lange Roboterarm liefert diese erste pulverisierte Gesteinsprobe an die Einlassöffnungen des Roverdecks zur Analyse durch das leistungsstarke Duo miniaturisierter Chemielabors namens Chemin & SAM.

Bildunterschrift: Curiosity setzt einen Roboterarm auf Sol 129 ein und untersucht Gestein mit wissenschaftlichen Instrumenten von APXS und MAHLI, um die Zusammensetzung von Gestein und Boden zu charakterisieren. Dieses zusammengesetzte Mosaik wurde aus Navcam-Bildern von Sol 129 (16. Dezember) und früheren Sols zusammengefügt und zeigt die Position der Chemin-Probeneinlassöffnung auf dem Roverdeck. Bildnachweis: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Die Neugierde wird mindestens einen weiteren Monat oder länger damit verbringen, Glenelg zu untersuchen, bevor sie sich auf den fast einjährigen Weg zu ihrem Hauptziel macht - den Sedimentschichten des Unterlaufs des 5 km hohen Berges namens Mount Sharp.

Bildunterschrift: Scannen von Mount Sharp aus Yellowknife Bay auf Sol 136. Dieses aus Mastcam 100-Kamerabildern zusammengestellte Fotomosaik wurde von Curiosity auf Sol 136 (23. Dezember) aufgenommen - von ihrem aktuellen Standort aus. Es zeigt einen Teil des geschichteten Hügels namens Mount Sharp, ihr Hauptziel. Der Erwerb eines hochauflösenden 360-Farben-Panoramas aus Yellowknife Bay hat für den Rover während der Weihnachtsferien eine hohe Priorität. Bildnachweis: NASA / JPL-Caltech / Marco Di Lorenzo / Ken Kremer
In Luftlinie des Mars sind die atemberaubenden Umgebungen des Mount Sharp etwa 10 km entfernt.
Das Missionsziel besteht darin, nach Lebensräumen zu suchen und festzustellen, ob der Mars jemals das mikrobielle Leben in der Vergangenheit oder Gegenwart während der zweijährigen primären Missionsphase unterstützt haben könnte.

Bildunterschrift: Curiosity Traverse Map, Sol 130. Diese Karte zeigt, wo Curiosity zwischen der Landung an einem Ort namens „Bradbury Landing“ und der Position, die während Sol 130 (17. Dezember 2012) an einem Ort namens „Yellowknife Bay“ erreicht wurde, gefahren ist befindet sich in einem Gebiet namens "Glenelg". Der Einschub zeigt die letzten Beine der Traverse detaillierter. Bildnachweis: NASA / JPL-Caltech / Univ. von Arizona